From a raw pixel to an operational 4D twin.
Follow a single intersection through our entire pipeline — the same patch of Earth, reconstructed step by step from a satellite pass all the way to a drivable, simulation-ready 4D digital twin. The exact workflow we scale to whole cities.

Tri-stereo from space, multi-head from the air
We start with Level-1 satellite imagery — monocular, stereo and tri-stereo, panchromatic and multispectral — then add five-head aerial capture at centimetre resolution, with full camera parameters for every frame.
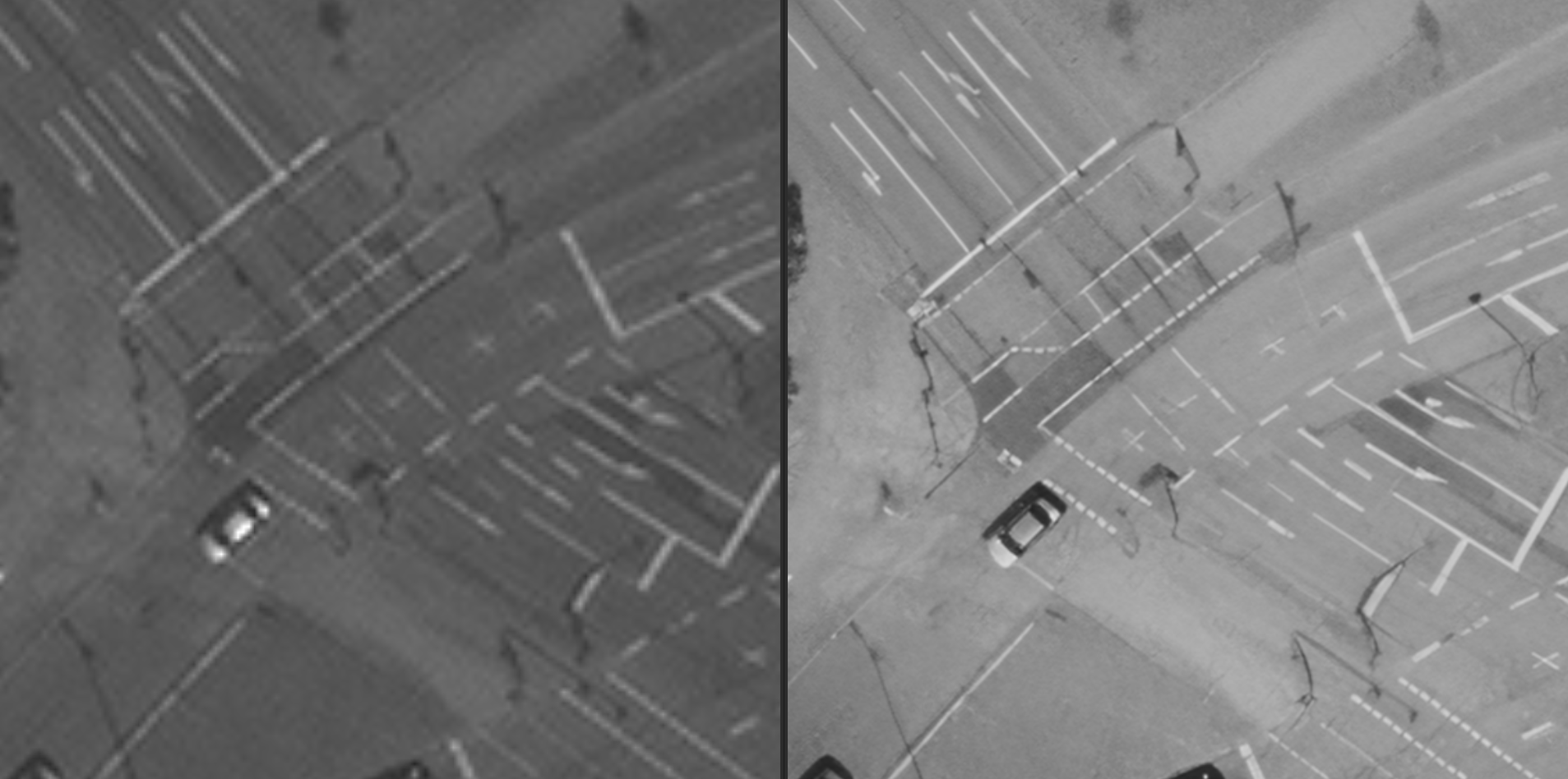
TrueHD super-resolution
Atmospheric & geometric correction and pansharpening prepare the imagery; then our proprietary AI super-resolution lifts native 30 cm satellite to 7.5 cm — and 8.6 cm airborne to 2 cm — without a new flight. Left native, right enhanced.
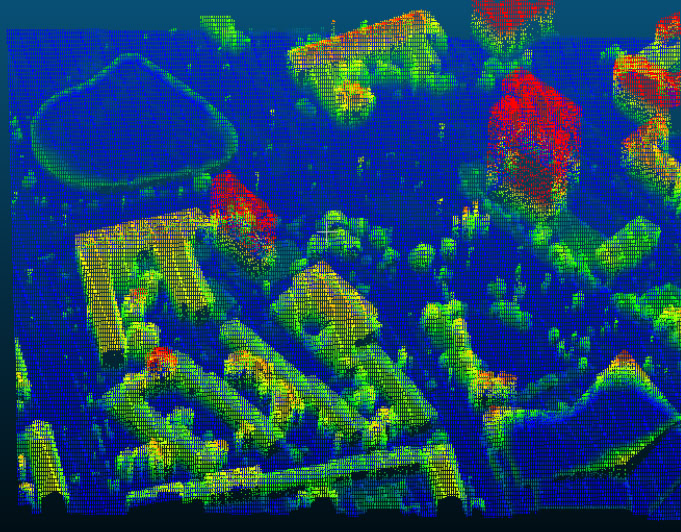
Ortho, DSM/DTM, point cloud & mesh
Bundle adjustment and dense matching produce true-ortho, surface and terrain models, a dense 3D point cloud and a textured mesh — everything measurable and georeferenced.
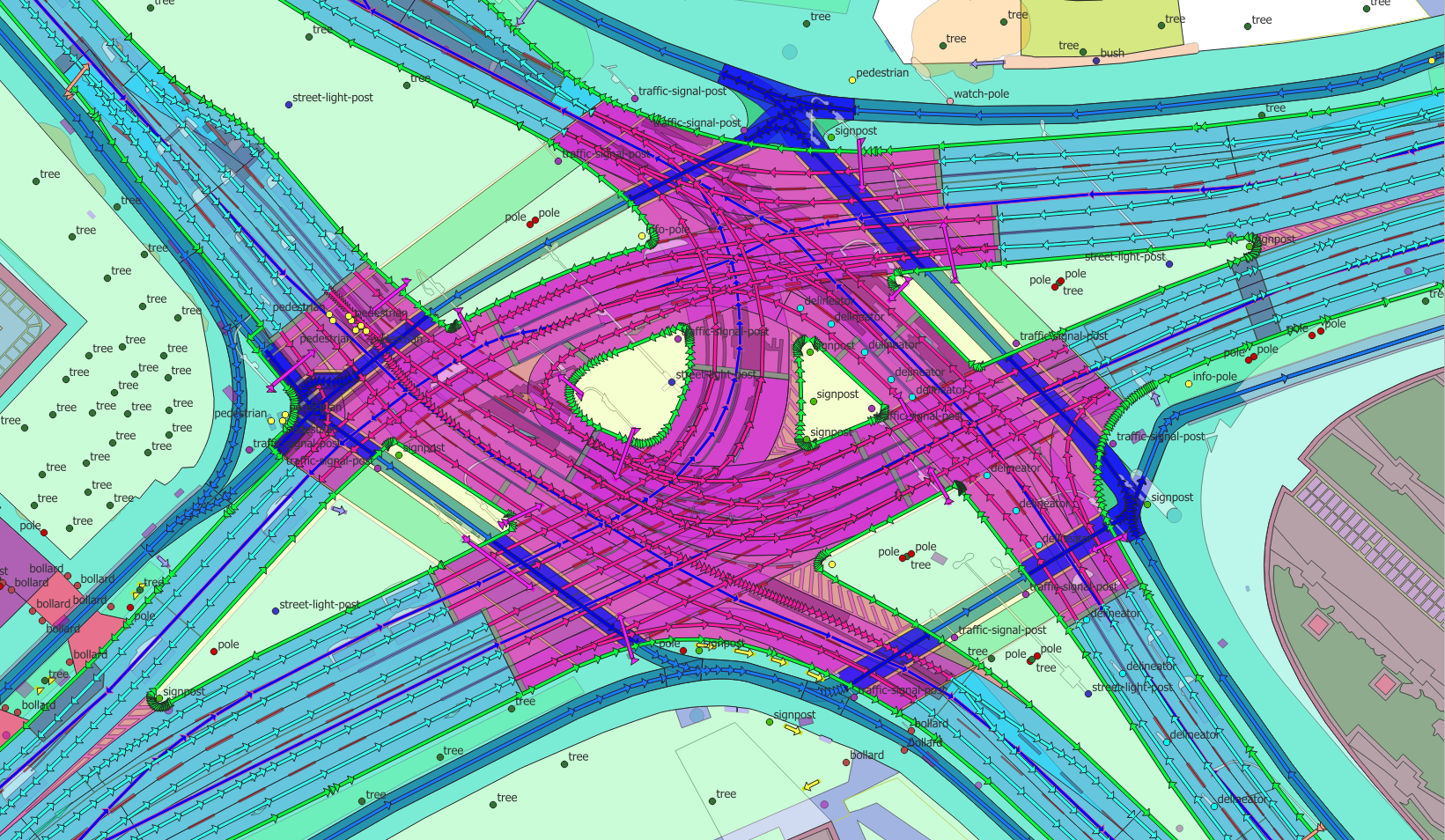
Pixels become an HD vector map
15+ proprietary AI algorithms extract buildings, lanes, sidewalks, furniture and land use as clean 2D / 2.5D / 3D vectors — SD and HD — exported as Shapefile, GeoJSON, KML and lane-accurate ASAM OpenDRIVE (the road-network standard driving simulators read natively).

 Before
After
Before
After
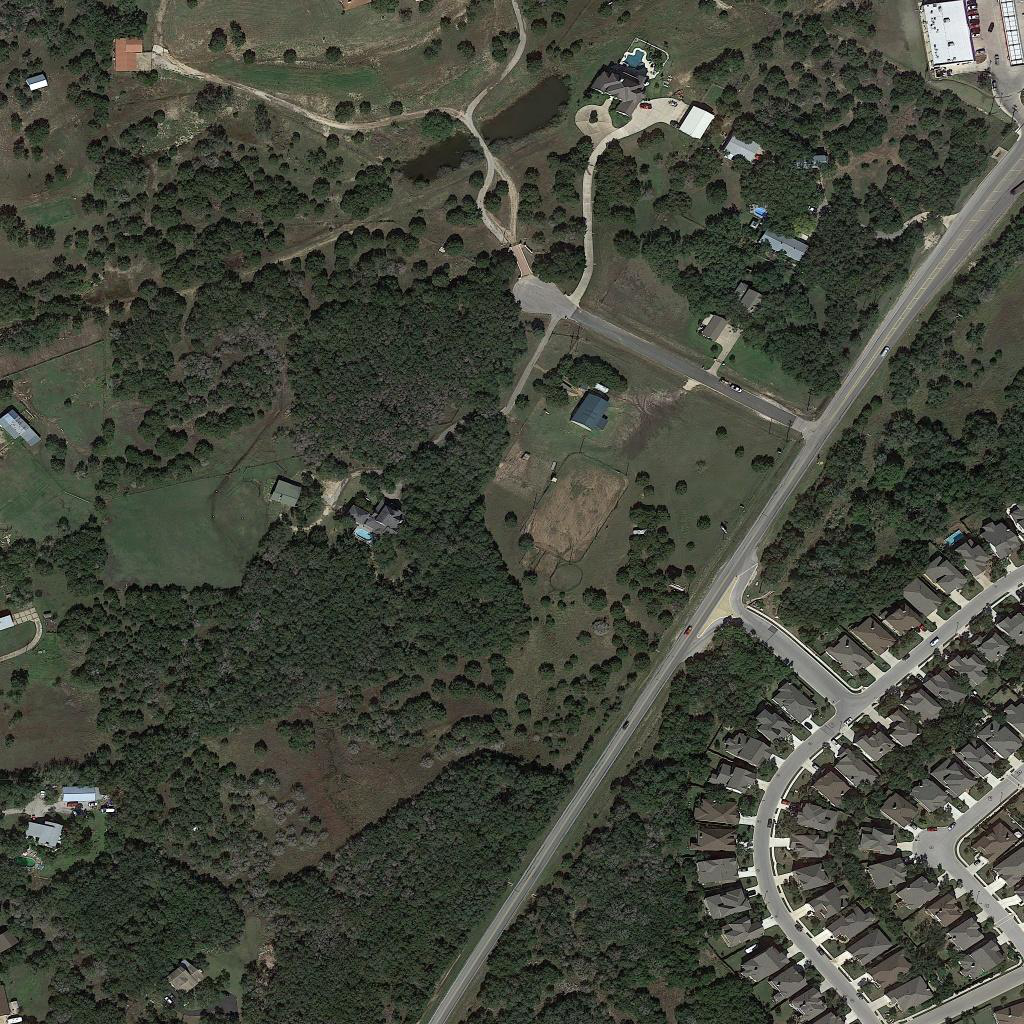
Detect what changed — automatically
Drag the slider: between two acquisitions, a new development appears. Our AI flags it at building level — so the twin tracks reality instead of freezing at capture time.
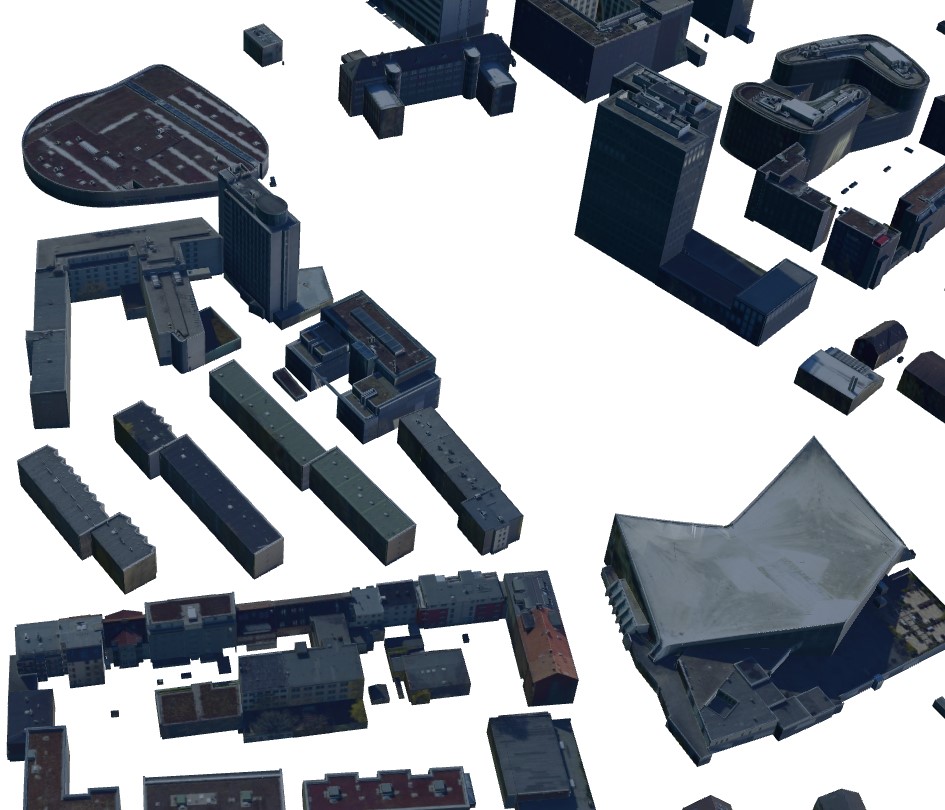
Semantic 3D — LoD1 to LoD3.3
The mesh becomes clean, semantic 3D buildings with textured façades — modelled to OGC CityGML and fused with buildingSMART IFC (BIM), then exported to every open format your tools speak.
A drivable, photoreal twin
The same ground truth becomes a raytraced Unreal-engine twin with Nanite & Lumen — driving, flight, weather, seasons, time of day, traffic, flood and earthquake, all simulated in-engine, with VR/XR.
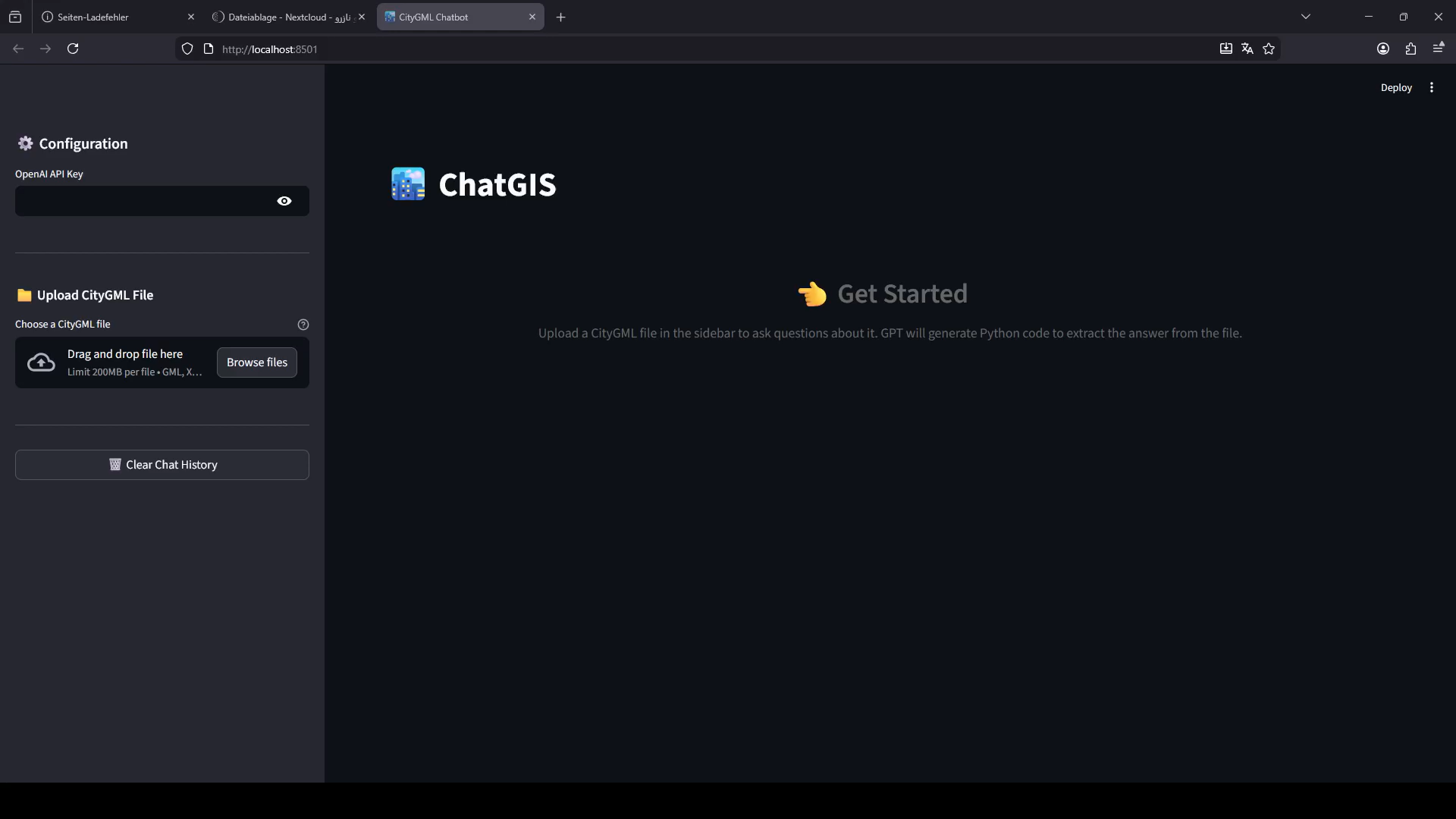
An AI agent that understands your twin
ChatGIS answers questions about your maps, CityGML and the twin in plain language; smart NPCs and a MetaHuman guide bring the scene to life — and it all lives in a navigable geospatial metaverse.
Let's model your world.
Send us your area of interest and what you need to see. We'll return a sample over your own location and walk you through the platform.