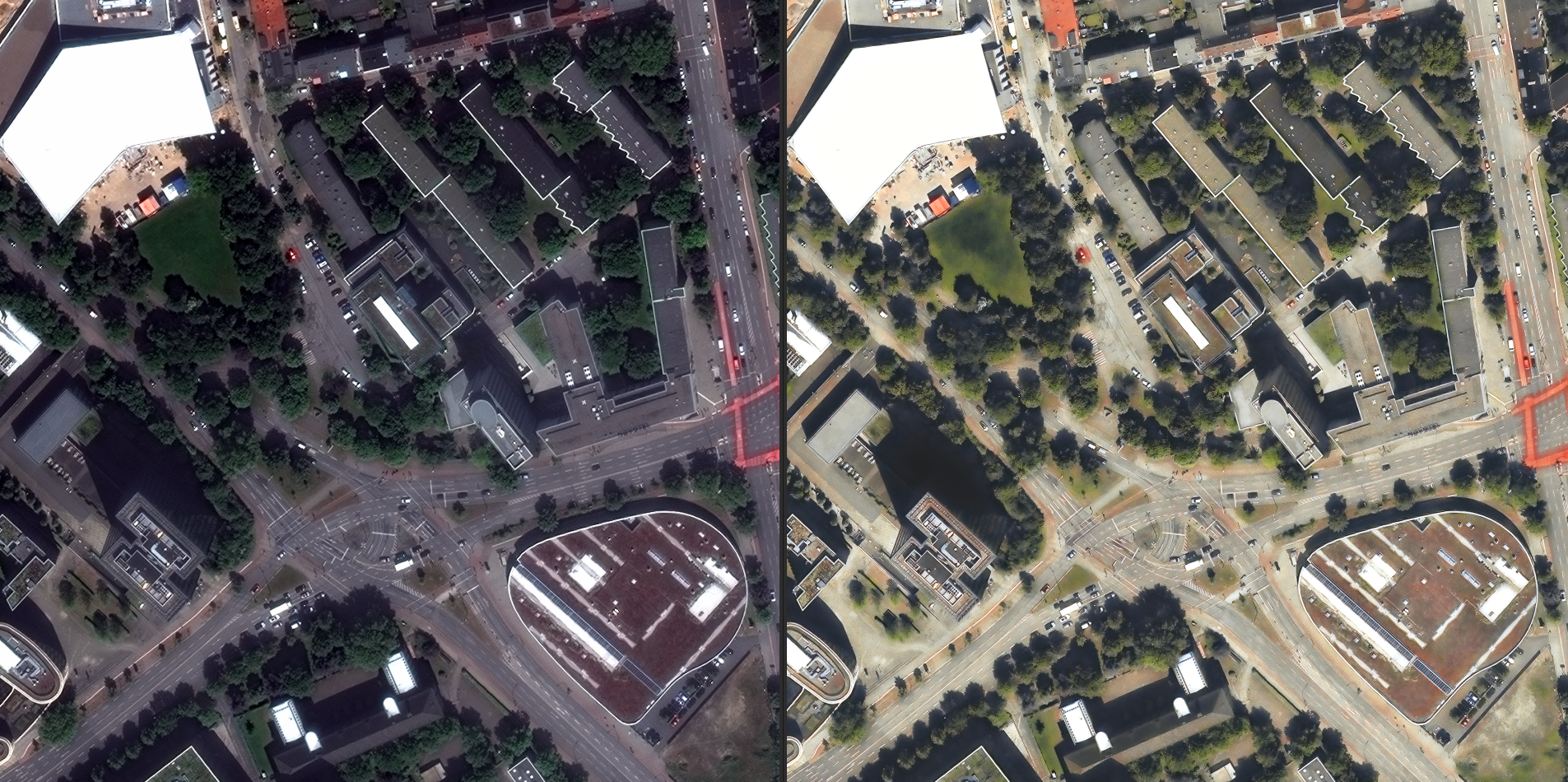
Location: Germany, various urban and suburban · Data: 650 paired samples — high-resolution RGB images with synchronised LiDAR point clouds.
We produced high-precision, multi-layer annotations for a large dataset of synchronised camera and LiDAR data — the kind of carefully labelled ground truth that multimodal perception models are trained and validated on.
Six complementary outputs
The specification called for six output types, each with detailed class definitions and strict geometric and attribute requirements, including:
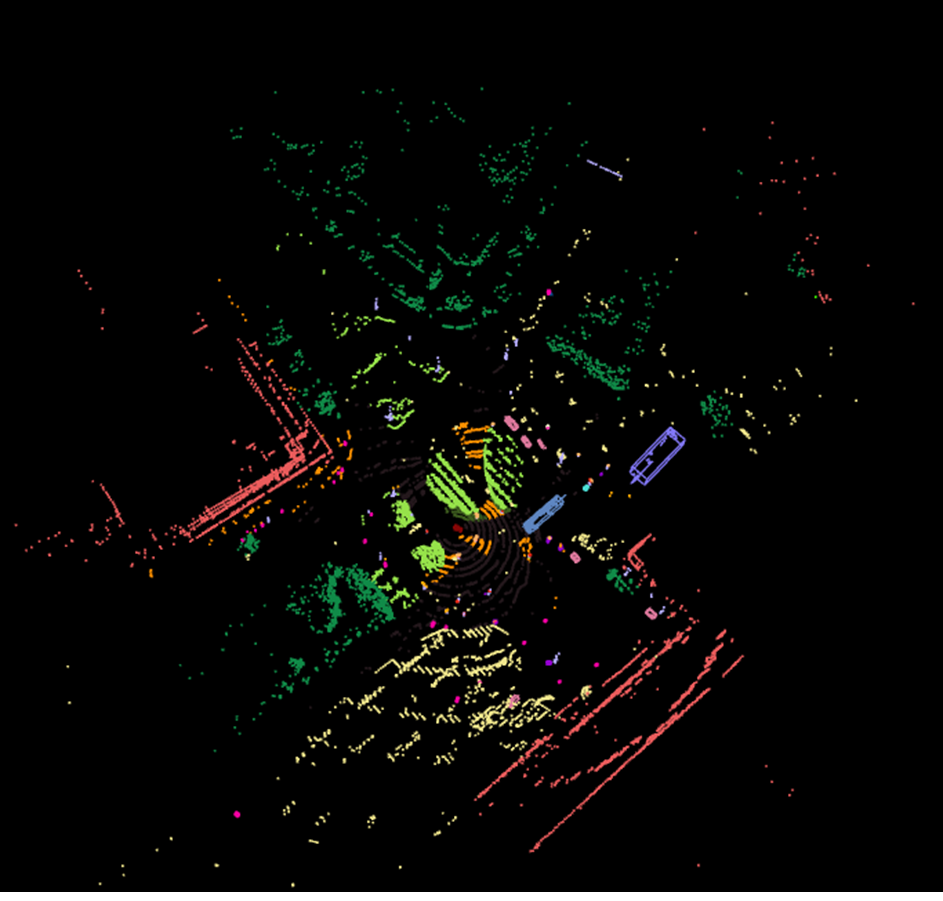
- 3D bounding boxes — oriented cuboids in LiDAR/world coordinates.
- Per-point semantic labels — every LiDAR point assigned a class.
- 2D image annotations registered to the 3D data, across a wide range of object categories and surface types.
Pairing 2D appearance with 3D geometry is what lets models reason about shape and surface together; consistently labelled pairs at this scale are the fuel for that training.