A digital twin you can only look at is a picture. A digital twin you can drive, fly and walk through is a simulator — and that is where the real value sits for mobility, training and planning. This is how we turn map data into a real-time, navigable world in Unreal Engine.
Start with the map, end with a scene
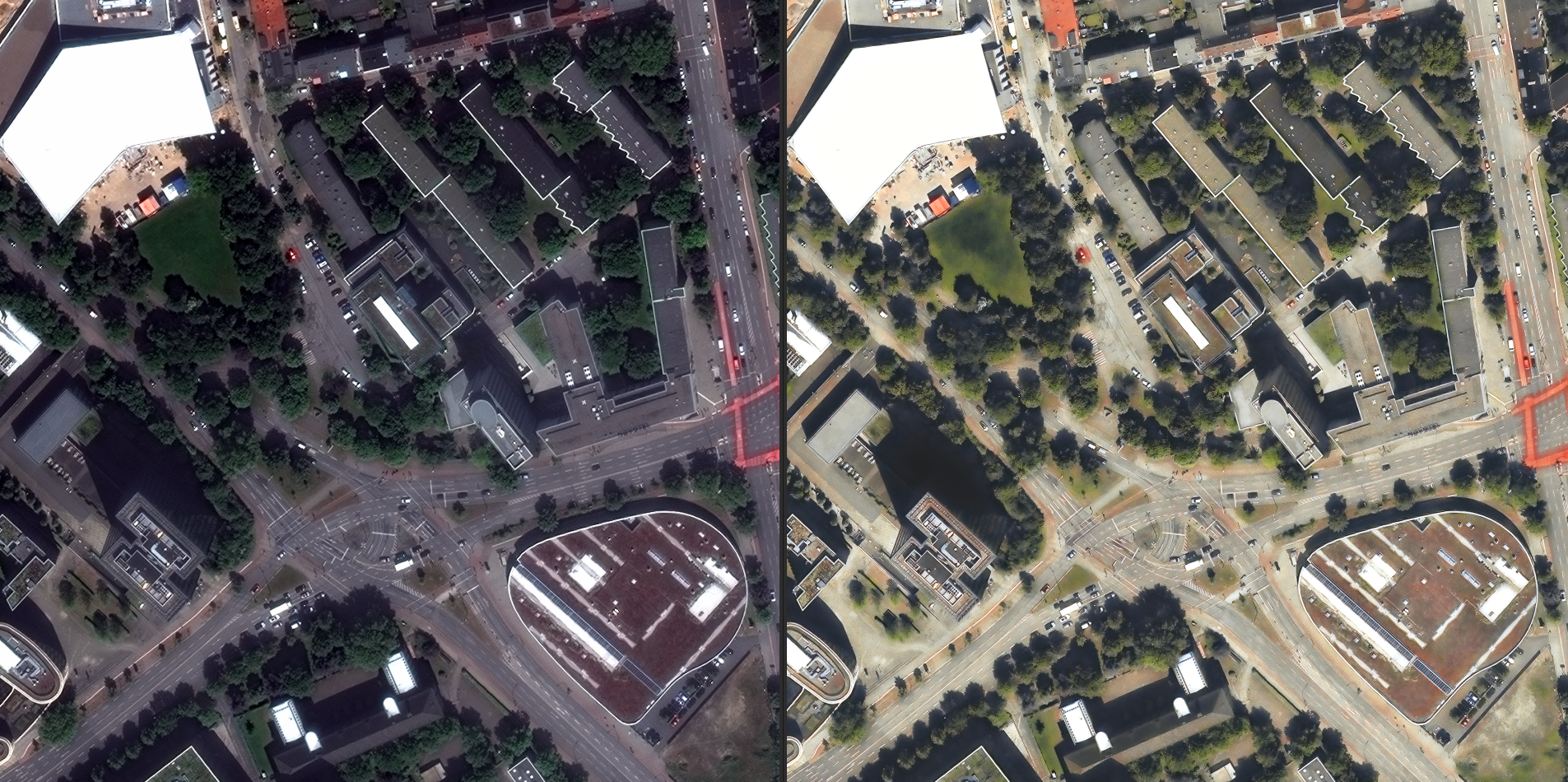
We take road networks, building footprints, land cover and terrain — from OpenStreetMap, from our own HD mapping, or both — and procedurally generate 3D geometry: extruded buildings, surfaced roads with real lane markings, vegetation, street furniture. The terrain comes from our digital elevation model, so hills and slopes match the real place.

Bring it to life
- Traffic and agents that obey the lane graph from our HD map.
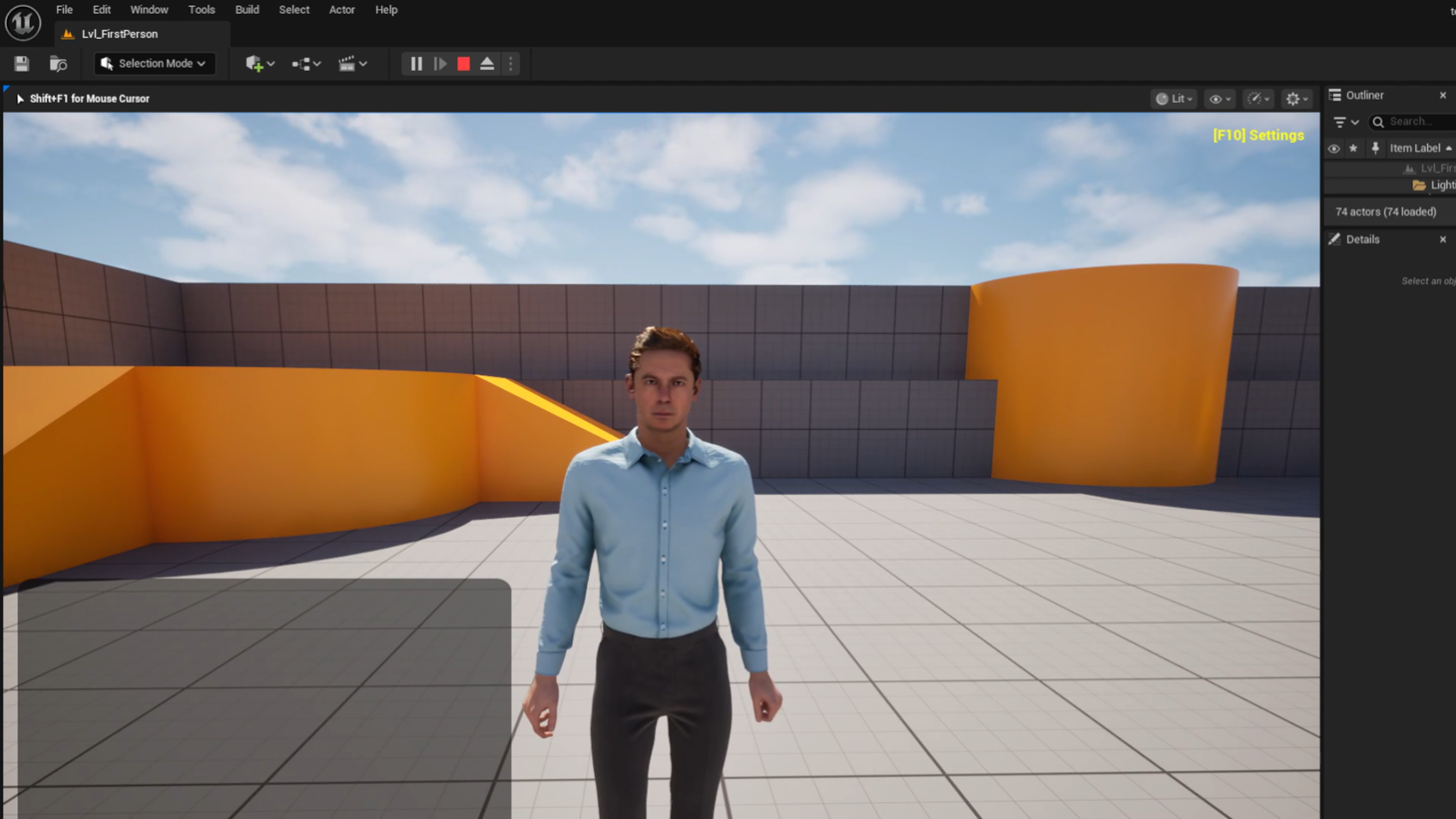
- AI characters — pedestrians and MetaHumans — for crowd and pedestrian-interaction scenarios.
- Sensor simulation — virtual cameras and LiDAR for testing perception stacks.
- Pixel streaming so the whole world runs in a browser, no install.
Because the scene is generated from georeferenced data, it stays true to the real world — drive the same junction you mapped from space. Open the pixel-streamed demo.